Tesla FSD V14 Patent Reveals the Secret Behind Its Human-Like Driving
How a New Tesla Patent Explains the Driving Breakthrough
Tesla’s Full Self-Driving software has undergone a noticeable transformation with the release of its V14 architecture. Anyone who has experienced it firsthand will tell you the difference is striking — the nervous, stop-start behavior of earlier versions has given way to something that genuinely resembles how a confident, experienced human drives. A newly published patent sheds light on exactly how Tesla pulled this off, and why the same technology will soon reach older vehicles through a V14-Lite update.
The Old Approach and Its Limits
Early versions of Tesla’s Autopilot and FSD leaned on vast amounts of hand-coded rules to navigate the road. When approaching a complex situation like a busy intersection, the system essentially tried to calculate every possible outcome simultaneously — where every pedestrian might step, how fast every car was traveling, whether a cyclist might veer left. While thorough in theory, this brute-force method was computationally brutal in practice. The result was sluggish decision-making, excessive caution, and driving that felt mechanical and unnatural.
A Smarter Decision-Making Structure From Tesla
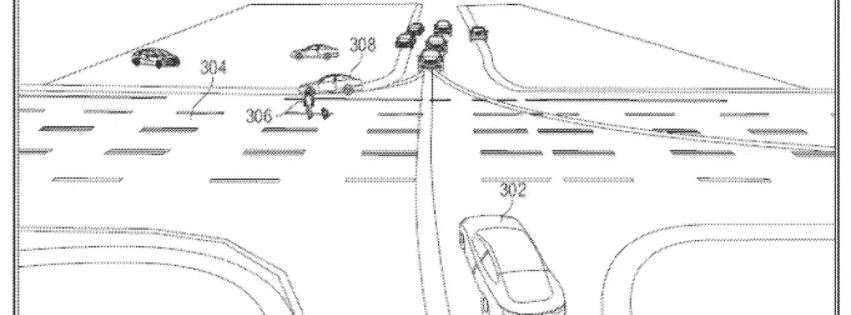
Tesla’s patent — titled “Artificial Intelligence Modeling Techniques for Joint Behavior Planning and Forecasting” — describes a fundamentally different approach. Rather than attempting to model every conceivable scenario at once, the system uses what the patent calls a hierarchical nodal graph.
The idea is elegant in its simplicity. The AI defines a specific Goal Node — say, completing an unprotected left turn across two lanes of traffic. It then identifies only the agents that are actually relevant to that goal, creating Interaction Nodes for each one. Instead of processing the entire environment simultaneously, the system chains these nodes together in a logical sequence: wait for the pedestrian to clear, hold for the approaching car, then proceed into the gap behind it.
This mirrors the way a human driver naturally thinks — focusing attention on what matters right now, rather than trying to mentally juggle everything at once.
Tesla Grading Maneuvers Like a Human Would
The real ingenuity lies in how the system evaluates its options. Each potential action receives a Node Score based on several weighted factors. Physics and collision avoidance remain the top priority — the car will never plot a path that risks a crash. But beyond that hard constraint, three new psychological dimensions come into play.
The first is comfort: will this maneuver jolt passengers or cause unnecessary discomfort? The second is intervention likelihood: is this action so abrupt or unexpected that a human occupant would feel compelled to grab the wheel? The third is a human-like discriminator: does this resemble how a real person would actually handle this situation?
By scoring its own potential actions against a large database of real human driving behavior, the vehicle effectively teaches itself to favor smooth, intuitive decisions over technically correct but robotic ones. The system is asking itself, with every choice, “is this what a good driver would do?”
Cutting the Computational Fat
This scoring process enables what the patent describes as aggressive pruning. Any action branch that scores poorly — perhaps because it risks a collision or would likely alarm the driver — is immediately discarded. The system stops wasting processing power on bad ideas the moment they’re identified as such. The remaining high-scoring options are then combined into a final Trajectory Score, and the best path is executed.
This pruning mechanism turns out to be the key to Tesla’s ability to bring V14 features to its older Hardware 3 platform. During the 2026 Q1 earnings call, Tesla’s Autopilot chief Ashok Elluswamy confirmed that a V14-Lite update would deliver meaningful feature parity to HW3 vehicles, even though that hardware isn’t capable of supporting full Robotaxi operations.
By continuously eliminating poor options and focusing only on the most promising paths, the system dramatically reduces the computational demands of navigating complex urban environments — light enough, apparently, to run on hardware that’s several years old.
The broader takeaway here is telling. While much of the industry remains fixated on raw hardware power, Tesla’s edge increasingly appears to come from software efficiency. Teaching a car to think like a human, it turns out, also means it can do more with far less.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}